V realnem času operacijski sistemi (RTOS) se uporabljajo v okoljih, kjer je treba v kratkem času oziroma v določenih rokih sprejeti in obdelati veliko število dogodkov, večinoma zunaj računalniškega sistema. takšne aplikacije so industrijski nadzor, telefonska preklopna oprema, nadzor letenja in simulacije v realnem času. Pri RTOS se čas obdelave meri v desetinkah sekunde. Ta sistem je časovno vezan in ima določen rok. Obdelava v tej vrsti sistema mora potekati znotraj podanih omejitev. V nasprotnem primeru bo to povzročilo okvaro sistema.
Primeri operacijskih sistemov v realnem času so sistemi za nadzor letalskega prometa, sistemi za nadzor ukazov, sistemi rezervacij letalskih prevoznikov, srčni spodbujevalniki, omrežni multimedijski sistemi, roboti itd.
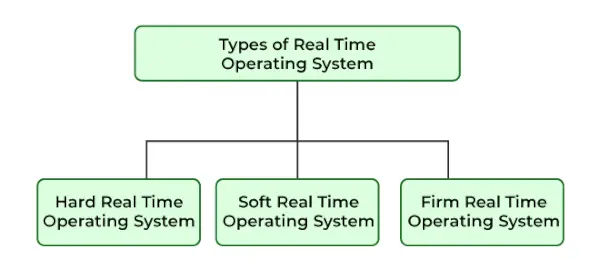
Operacijski sistemi v realnem času so lahko treh vrst –
RTOS
modem proti usmerjevalniku
- Trdi operacijski sistem v realnem času: Ti operacijski sistemi zagotavljajo, da so kritične naloge opravljene v določenem času.
Na primer, robota najamejo za varjenje avtomobilske karoserije. Če robot vari prezgodaj ali prepozno, avtomobila ni mogoče prodati, zato gre za trd sistem v realnem času, ki zahteva popolno varjenje avtomobila s strani robota komaj pravočasno., znanstveni poskusi, sistemi za medicinsko slikanje, industrijski nadzorni sistemi, orožje sistemi, roboti, sistemi za nadzor zračnega prometa itd.
primer binarnega iskalnega drevesa
- Mehki operacijski sistem v realnem času: Ta operacijski sistem omogoča nekaj sprostitve v časovni omejitvi.
Na primer – multimedijski sistemi, digitalni avdio sistemi itd. Eksplicitni, s programerjem definirani in nadzorovani procesi se pojavljajo v sistemih v realnem času. Ločen proces se spremeni z obravnavanjem enega samega zunanjega dogodka. Proces se aktivira ob pojavu povezanega dogodka, ki ga signalizira prekinitev.
Večopravilno delovanje je doseženo z razporejanjem procesov za izvajanje neodvisno drug od drugega. Vsakemu procesu je dodeljena določena stopnja prioritete, ki ustreza relativni pomembnosti dogodka, ki ga servisira. Procesor je dodeljen procesom z najvišjo prioriteto. To vrsto razporeda, imenovano prednostno razporejanje, uporabljajo sistemi v realnem času.
- Trden operacijski sistem v realnem času : RTOS te vrste morajo slediti tudi rokom. Kljub majhnemu vplivu ima lahko zamuda roka neželene posledice, vključno z zmanjšanjem kakovosti izdelka. Primer: Multimedijske aplikacije.
- Deterministični operacijski sistem v realnem času: Doslednost je glavni ključ pri tej vrsti operacijskega sistema v realnem času. Zagotavlja, da se vse naloge in procesi ves čas izvajajo s predvidljivim časovnim razporedom, zaradi česar je bolj primeren za aplikacije, pri katerih je časovna natančnost zelo pomembna. Primeri: INTEGRITETA, PikeOS.
Prednosti:
Prednosti operacijskih sistemov v realnem času so naslednje:
programček
- Največja poraba: Največji izkoristek naprav in sistemov. Tako več proizvodnje iz vseh virov.
- Prestavljanje nalog: Čas, dodeljen za prestavljanje nalog v teh sistemih, je zelo kratek. Na primer, v starejših sistemih traja približno 10 mikrosekund. Prestavljanje ene naloge na drugo in v najnovejših sistemih traja 3 mikrosekunde.
- Osredotočite se na uporabo: Osredotočite se na zagnane aplikacije in manj pomembne aplikacije, ki so v čakalni vrsti.
- Operacijski sistem v realnem času v vgrajenem sistemu: Ker je velikost programov majhna, so lahko RTOS tudi vgrajeni sistemi, kot so transportni in drugi.
- Brez napak: Tovrstni sistemi so brez napak.
- Dodelitev pomnilnika: Dodeljevanje pomnilnika je najbolje upravljati v teh vrstah sistemov.
Slabosti:
Slabosti operacijskih sistemov v realnem času so naslednje:
- Omejene naloge: Zelo malo nalog se izvaja hkrati in njihova koncentracija je zelo manjša na nekaj aplikacijah, da bi se izognili napakam.
- Uporabite težke sistemske vire: Včasih sistemski viri niso tako dobri in so tudi dragi.
- Kompleksni algoritmi : Algoritmi so zelo zapleteni in oblikovalcu je težko pisati.
- Signali gonilnika naprave in prekinitev: Potrebuje posebne gonilnike naprav in prekinitvene signale, da se čim prej odzove na prekinitve.
- Prednost niti: Ni dobro nastaviti prioritete niti, saj so ti sistemi zelo manj nagnjeni k preklapljanju nalog.
- Najmanjši preklop: RTOS izvaja minimalno preklapljanje nalog.
Primerjava običajnih operacijskih sistemov in operacijskih sistemov v realnem času:
| Uredite OS | OS v realnem času (RTOS) |
|---|---|
| Kompleksno | Enostavno |
| Po najboljših močeh | Zagotovljen odziv |
| Pravičnost | Stroge časovne omejitve |
| Povprečna pasovna širina | Najmanjše in največje omejitve |
| Neznane komponente | Komponente so znane |
| Nepredvidljivo vedenje | Predvidljivo vedenje |
| Vklopi in igraj | RTOS je nadgradljiv |